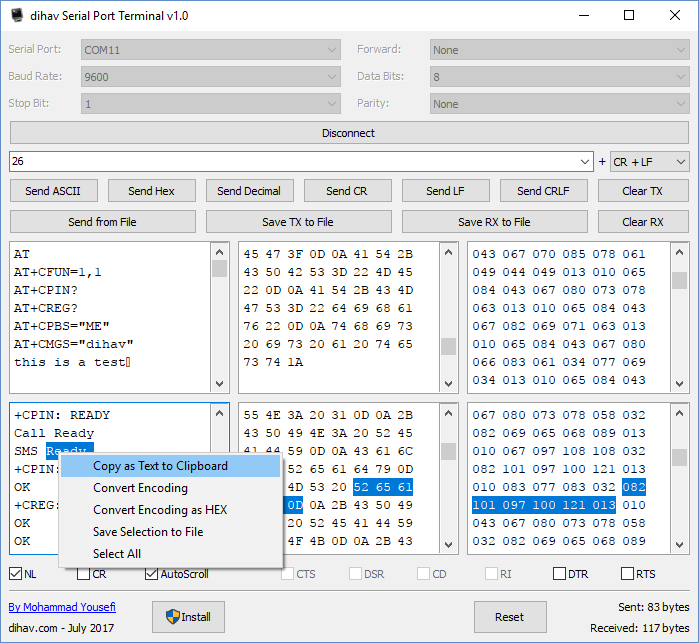
Software screenshot:
Podrobnosti Software:
Verze: 1.0.2
Datum uploadu: 15 Apr 15
Vývojka: Dihav
Licence: Volný
Popularita: 92
Velikost: 11911 Kb
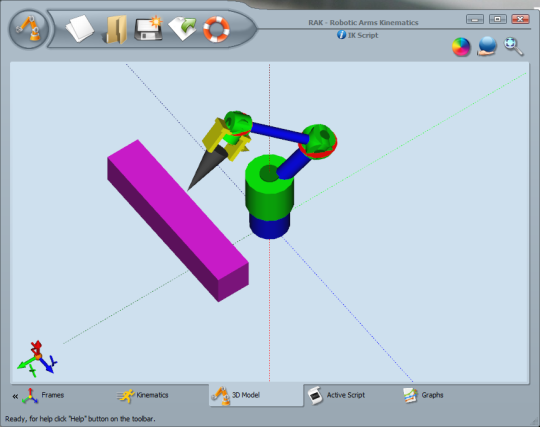
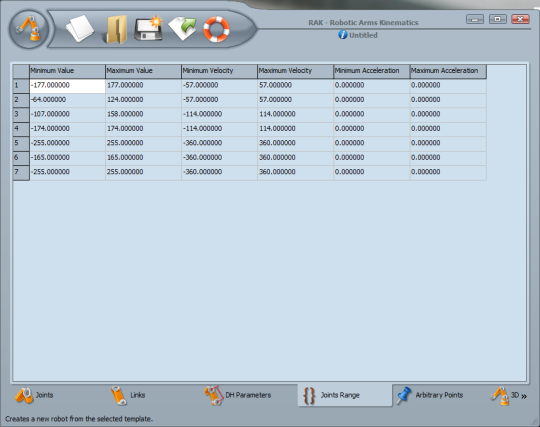
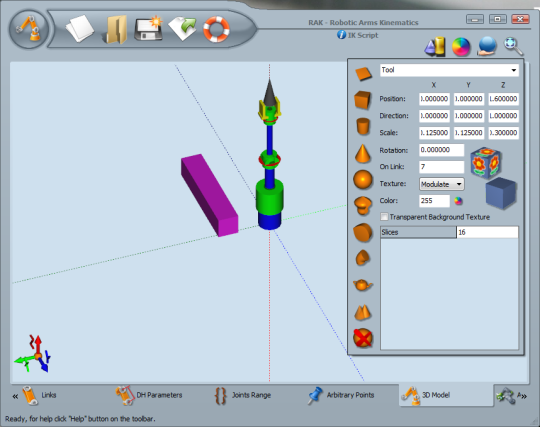
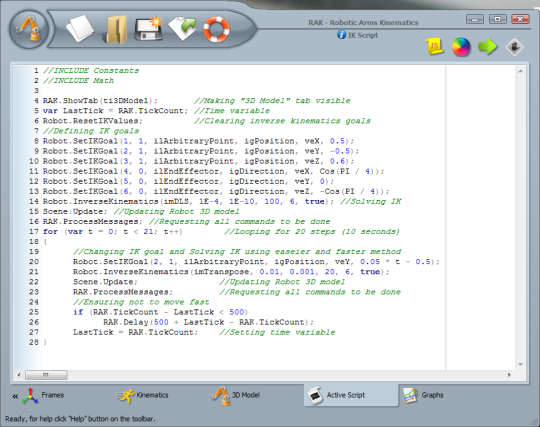
RAK je program pro modelování robotické paže a výpočtu jejich kinematiky.
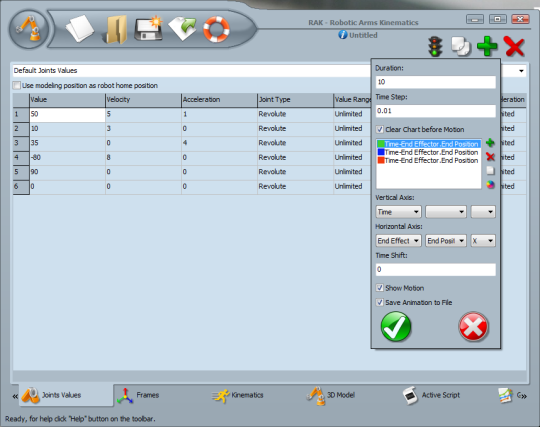
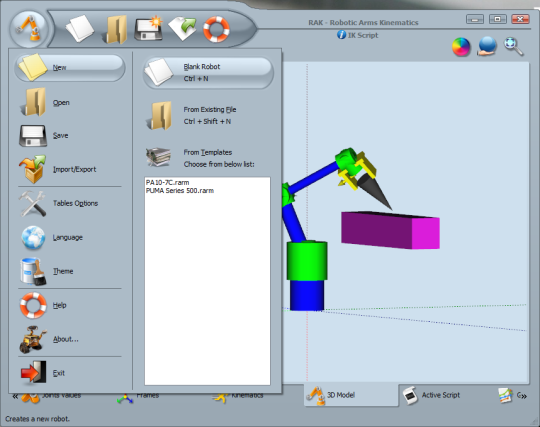
Tento program může simulovat otevřené smyčky, jednotlivé roboty řetězcem.
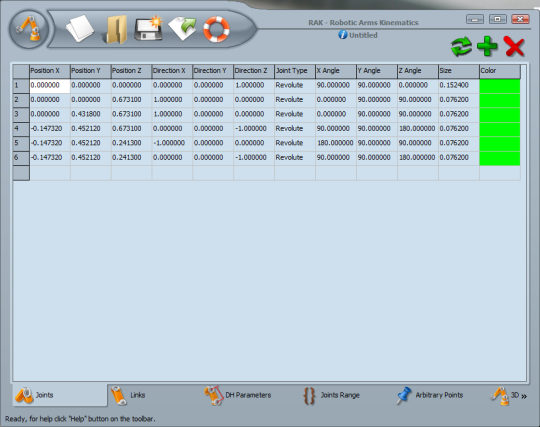
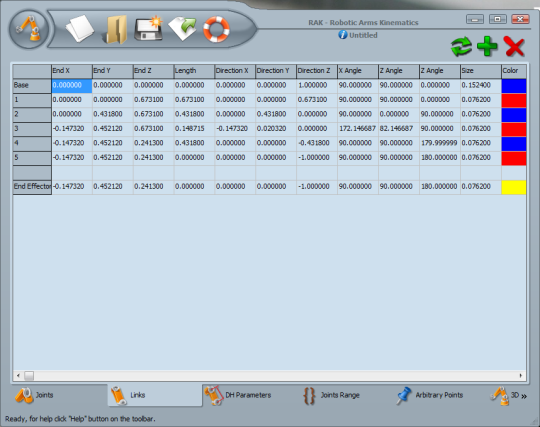
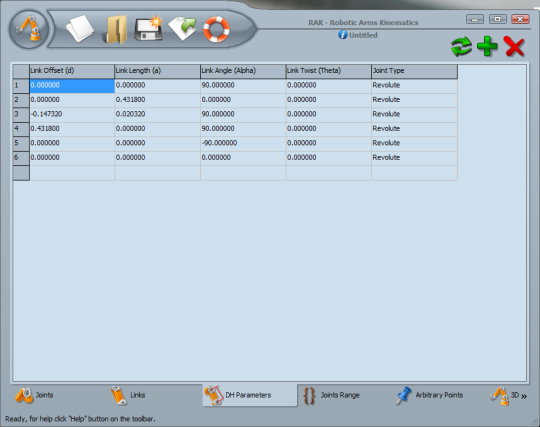
Můžete modelovat robota, jeho pozice kloubů nebo Denavitova-Hartenberg (DH) parametrů.
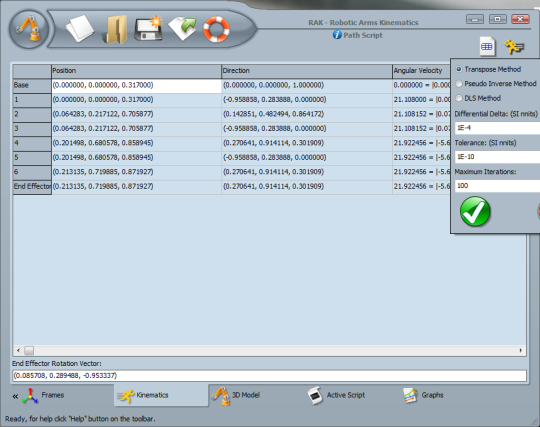
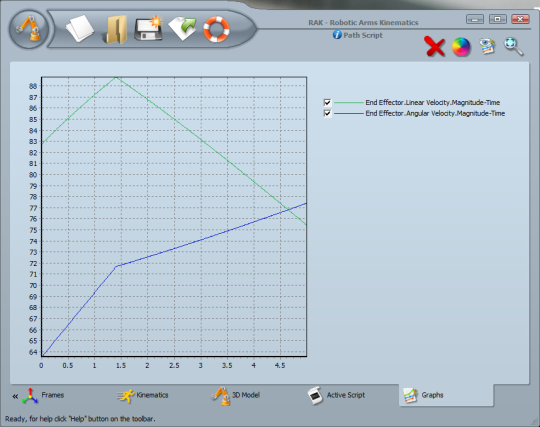
Můžete vypočítat kinematiku a inverzní kinematiky robota v tomto programu.
K dispozici je také programovací oblast psát programy a kontrolovat skutečné roboty.
Komentáře nebyl nalezen